高沃律师 浙大开学机器狗帮拿行李,发明专利不到3个月获授权
发布日期:2024-09-19 23:19
来源类型:杂谈车界 | 作者:艾什丽·斯科特
| 【494949澳门今晚开什么】 【2024新澳免费资料】 【澳门一肖一码精准100王中王】 | 【澳门金牛版正版资料大全免费】 【新澳开奖记录今天结果】 【2024年新澳门王中王资料】 【管家婆最准一肖一码】 【新澳彩开奖结果查询】 【2024新澳门天天开好彩大全孔的五伏】 【4949澳门免费资料大全特色】 【2024今晚澳门特马开什么号】 【新澳高手论坛资料大全最新】 【2O24澳彩管家婆资料传真】

8月18日,浙江大学在杭州校园内举行了一场别开生面的新生报到活动。由该校师生团队研发的机器狗在迎新中大放异彩,它们不仅能够敏捷行走,还能够帮助新生搬运重达20公斤的行李,甚至还能完成空翻等高难度动作,给在场的新生和家长带来了惊喜。
这些机器狗的亮相,不仅展示了浙江大学在科技创新方面的实力,也让新生们在大学生活的第一天就体验到了科技的力量和学校的贴心服务。此举无疑将激发新生们对科技和学术探索的兴趣,有助于培养大家的创新思维和解决问题的能力。
 来源:和讯网
来源:和讯网
抱着强烈的好奇心,小知于天眼查进行了查询。
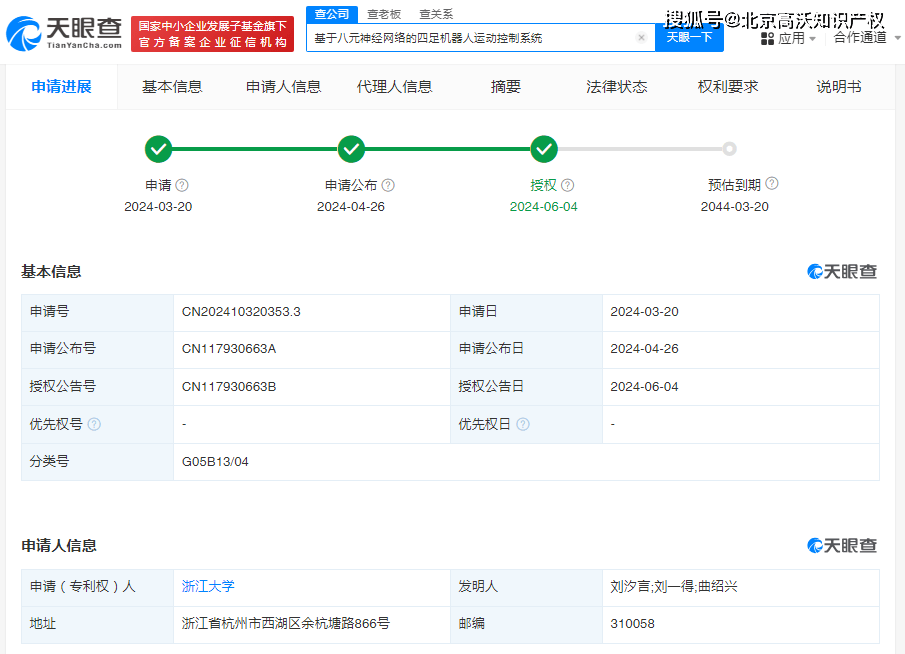
2024年3月20日,浙江大学申请了发明专利“基于八元神经网络的四足机器人运动控制系统”,仅用了不到3个月的时间,于2024年6月4日获得授权。
本发明公开了一种基于八元神经网络的四足机器人运动控制系统,属于四足机器人运动控制领域。该系统包括:信号调控模块,用于生成步态控制参数;信号生成模块,用于接收信号调控模块生成的步态控制参数,并将其输入到八元神经网络中,对八个神经元的常微分方程分别进行求解,获得步态节律信号;信号后处理模块,用于接收信号生成模块中求解得到的步态节律信号,并转换为对应控制四足机器人四条腿上共八个关节作动的位移信号。本发明基于对称性原则设计中枢模式发生器步态的节律性以及髋膝关节相位关系,实现了对四足机器人多关节的低算力、高可靠性控制,提高了四足机器人在5种步态下的机动性和环境适应性。
 来源:天眼查
来源:天眼查
除了对机器人的运动控制,自主导航也是对其常见的任务需求。机器人需要根据传感器信息构建描述环境的地图,在地图中设定起点和终点,并在地图中进行路径规划。当环境较为复杂或机器人运动特性较独特时,环境建图和路径规划的设计会很大程度影响自主导航完成的质量。
2022年7月13日,浙江大学还申请了专利“一种四足机器人的地图构建与路径规划方法”。
本发明公开了一种四足机器人的地图构建与路径规划方法,主要由四足机器人几何模型、地图构建器、四足机器人运动学模型、路径规划器实现。本发明基于四足机器人的几何特性,构建一种同时考虑四足机器人的位置和航向角信息的地图。本发明将待规划的位置和航向角在三维栅格地图中表示,将二维平面的导航任务转化为了三维空间搜索问题,提升了路径规划的效率;将四足机器人的几何外形通过合理简化,结合地图构建的过程,使路径规划结果不过于保守,同时保证安全性;将四足机器人的运动学模型和运动能力结合,构造独特的运动学约束,基于运动学模型和约束的A*算法,能充分利用信息并规划出平滑的路径。
 来源:天眼查
来源:天眼查
机器人技术发展至今已有60多年,从最初的简单自动化机器,到如今的复杂人工智能系统,机器人逐渐具备更高的灵活性、自主性和智能性,适应更多样化的应用场景。我们相信,随着高校、企业、科研院所等机构单位的研发与生产,人工智能将不断为经济社会发展注入新动能,深刻改变人们的生产生活方式。
2021年年底,工业和信息化部等十五部门印发的《“十四五”机器人产业发展规划》(以下简称《规划》)强调,要面向特殊环境作业等领域需求,重点推进特种机器人产品的研制及应用,拓展机器人产品系列,提升性能、质量和安全性,推动产品高端化、智能化发展。
在新一轮科技革命和产业变革中,人工智能、人形机器人等领域新赛道不断涌现,各国都在进行前瞻性谋划和布局。我们要抓住科技革命和产业变革的有利时机,持续投入、率先布局专利技术,构筑未来发展的新优势,做好科技创新和产业创新深度融合,为行业发展注入更多创新动力。
--------------------------
来源 | 和讯网 中国青年报 天眼查等
编辑 | 北京高沃知识产权(ID: gaowoip-com)
声明 | 部分图文内容源自网络,版权归原作者,侵删~返回搜狐,查看更多
责任编辑:

李俊锋:
7秒前:在新一轮科技革命和产业变革中,人工智能、人形机器人等领域新赛道不断涌现,各国都在进行前瞻性谋划和布局。
Sverrisson:
3秒前:该系统包括:信号调控模块,用于生成步态控制参数;信号生成模块,用于接收信号调控模块生成的步态控制参数,并将其输入到八元神经网络中,对八个神经元的常微分方程分别进行求解,获得步态节律信号;信号后处理模块,用于接收信号生成模块中求解得到的步态节律信号,并转换为对应控制四足机器人四条腿上共八个关节作动的位移信号。
沙菲克·艾哈迈德:
2秒前:2021年年底,工业和信息化部等十五部门印发的《“十四五”机器人产业发展规划》(以下简称《规划》)强调,要面向特殊环境作业等领域需求,重点推进特种机器人产品的研制及应用,拓展机器人产品系列,提升性能、质量和安全性,推动产品高端化、智能化发展。
圣地亚哥·塞古拉:
7秒前:由该校师生团队研发的机器狗在迎新中大放异彩,它们不仅能够敏捷行走,还能够帮助新生搬运重达20公斤的行李,甚至还能完成空翻等高难度动作,给在场的新生和家长带来了惊喜。